ТэЩЯзЂВсЃЌНсНЛИќЖрКУгбЃЌЯэгУИќЖрЙІФмЃЌШУФуЧсЫЩЭцзЊЩчЧјЁЃ
ФњашвЊ ЕЧТМ ВХПЩвдЯТдиЛђВщПДЃЌУЛгаеЫКХЃПЮввЊМгШы

x
БОЬћзюКѓгЩ qq1125913845 гк 2018-5-17 10:44 БрМ
ПЦЦеЃКЪ§зжЪНеёЖЏПижЦЦїЕФЗЂеЙРњГЬ
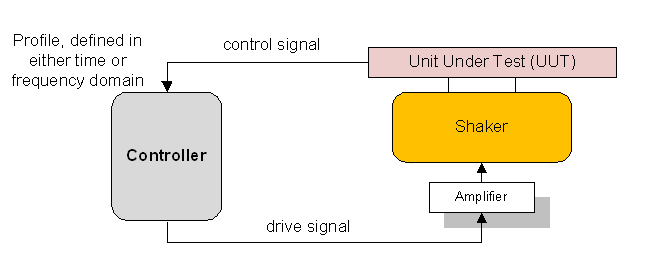
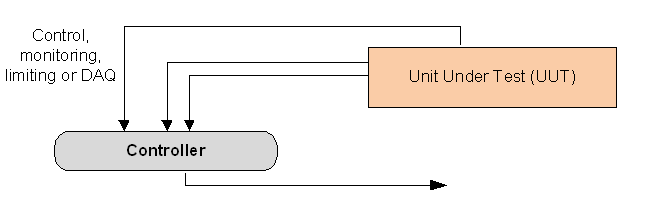
зїепЃКJames Zhuge, Ph.D., Crystal Instruments (УРЙњОЇзъвЧЦїЙЋЫО) еёЖЏПижЦЦїМђНщеёЖЏВтЪдЯЕЭГБЛЙуЗКгУгкКНПеЁЂКНЬьЁЂЕчзгЁЂЦћГЕЕШСьгђЕФПЩППадЪдбщЁЃЪ§зжЪНеёЖЏПижЦЦїЪЧвЛИіПЩвдЮЊеёЖЏЬЈЬсЙЉБеЛЗПижЦФмСІЕФМЦЫуЛњЯЕЭГЃЌЪЧећИіеёЖЏВтЪдЯЕЭГжаЕФжЧФмВПЗжЃЌБОЮФжївЊДггВМўМмЙЙНЧЖШУшЪі70ФъДњвдРДУРЙњеёЖЏПижЦЦїЕФбнЛЏЙ§ГЬЁЃ жЕЕУИНДјЬсГіЕФЪЧЃЌдчдк80ФъДњГѕЃЌеуНДѓбЇЕФЖЏЬЌВтЪдЙњМвбаОПЪвКЭЫежнЪЕбщвЧЦїГЇЃЈЫеЪдЃЉОЭПЊЪМбаЗЂжаЙњздМКЕФеёЖЏПижЦЦїЃЌеуДѓЕФбюЪРГЌНЬЪкЪЧетИіСьгђЕФЯШЧ§ЁЃЖјЯждкЃЌЫеЪдЪЧжаЙњИУСьгђЮЈвЛвЛМвЩЯЪаЙЋЫОЁЃ Ъ§зжеёЖЏПижЦЦїВњЩњЕчзгаХКХЧ§ЖЏЙІТЪЗХДѓЦїЃЌЙІТЪЗХДѓЦїдйЪфГіЕчСїаХКХвдЧ§ЖЏвКбЙЛђЕчДХеёЖЏЬЈЃЌЖјзїгУгкБЛВтЩшБИ(UUT)ЩЯЕФеёЖЏЯьгІЗДРЁЕНеёЖЏПижЦЦїЯЕЭГзїЮЊЗДРЁПижЦаХКХЁЃдкБеЛЗПижЦЛЗОГЯТЃЌПижЦаХКХБиаыдкЪБгђКЭЦЕгђЖМзёбФГжждЄЯШЩшЖЈЕФЬиадЃЌетаЉЬиадПЩвдАДееВЛЭЌЕФЙЄвЕЛђепОќЪТБъзМЖЈвхЮЊЃКе§ЯвSineЁЂЫцЛњRandomЁЂе§Яв+ЫцЛњSoRЁЂЫцЛњ+ЫцЛњRoRЁЂОЕфГхЛїЁЂГхЛїЯьгІЦзSRSЁЂТЗЦзЗТецЕШЁЃ ДѓЖрЪ§ЧщПіЯТЃЌЕЅжсЕФеёЖЏЬЈЖдНсЙЙНјааМЄРјЃЌдквЛаЉИпЖЫВтЪджаашвЊЪЙгУЖрИіеёЖЏЬЈаЮГЩЖржсЖрздгЩЖШЕФМЄРјЃЌдкЖрИіеёЖЏЬЈЭЌЪБЪЙгУЕФЧщПіЯТЃЌПижЦЯЕЭГашвЊОпгаЖрЪфШы/ЖрЪфГі(MIMO)ЕФЛЅЭЈЕРаХКХМЦЫуФмСІЁЃгУгкЖржсеёЖЏПижЦЯЕЭГЕФММЪѕБШЕЅжсЯЕЭГвЊИДдгЕФЖрЃЌдкБОЮФжажївЊЬжТлЕЅжсеёЖЏПижЦЯЕЭГЕФЧщПіЁЃ ПижЦаХКХвЊВЮПМвЛИіЛђЖрИіДгЪдМўЛёЕУЕФВтСПаХКХЃЌЕБЗЂЯжПижЦаХКХгыВтЪдФПБъФЃаЭгаЦЋВюЪБЃЌНЋЕїећЧ§ЖЏаХКХЪЙПижЦаХКХЧїНќФПБъФЃаЭЃЌПижЦЯЕЭГЪЕЪБЁЂСЌајЕиЖдеёЖЏЬЈНјааЖЏСІаое§вдДяЕНОЋШЗЕФПижЦЃЌАВШЋадМьВтЭЈЙ§вЛИіЗжВМЪНЕФВЛвРРЕгкPCМЦЫуЛњЕФдЫЫуДІРэНсЙЙРДНјааЁЃ ЯТЭМЫЕУїСЫБеЛЗПижЦЕФЙ§ГЬЃЌДЋИаЦї(ШчМгЫйЖШМЦ)гУгкВтСПЪдМўЕФеёЖЏЯьгІаЮГЩБЛПижЦаХКХЁЃ ЫцЛњПижЦЦїНЋСЌајЪфГівЛИіЫцЛњаХКХ(Ч§ЖЏаХКХ)ЃЌЦфЙІТЪЦзУмЖШЮЊдЄЖЈвхЕФЦЕЦзаЮзДЃЌетИідЄЖЈвхСЫаЮзДЕФЙІТЪЦзГЦЮЊФПБъЦзЁЃе§ЯвПижЦЦїНЋСЌајвдФГИіШЗЖЈЕФЕчбЙжЕЪфГівЛИіЩЈЦЕе§ЯваХКХЃЌЫљвдПижЦаХКХЪЧРре§ЯваХКХЃЌВЂЧвзёбдЄЖЈвхЕФЗљжЕЦзЁЃОЕфГхЛїПижЦЦїдкЪБМфгђжаЖЈвхашвЊЕФПижЦФПБъФЃаЭЁЃSRSПижЦдкГхЛїЯьгІЦзжаЖЈвхФПБъФЃаЭЁЃТЗЦзЗТецПижЦЦїНЋвЛИіГЄЪБМфЕФЪБгђаХКХЖЈвхЮЊФПБъФЃаЭЁЃе§ЯвМгЫцЛњЛђЫцЛњМгЫцЛњвВГЦЮЊЛьКЯФЃЪНПижЦЃЌАбЫцЛњКЭЦфЫќПижЦФЃЪННсКЯдквЛЦ№ЃЌЦфВтЪдЩшжУвВИќЮЊИДдгЁЃ ОнЙРМЦЪаГЁЩЯНќКѕ100%ЕФПижЦЦїЖМвЊЧѓОпгаЫцЛњКЭе§ЯвПижЦЙІФмЃЌДѓдМ50%вЊЧѓгаОЕфГхЛїЙІФмЁЃЛьКЯЙІФмКЭSRSЁЂЫВЬЌРњГЬМАТЗЦзЗТецашЧѓЯрЖдНЯЩйЃЌжЛдквЛаЉЬиЪтВтЪджаашвЊЁЃМДЪЙжЛгавЛИіМЄРјдДЃЌДгЪдМўЩЯНјааЖрЕуВтСПвВЪЧашвЊЕФЃЌЖрЕуВтСППЩгУгкШчЯТвЛаЉашвЊЃК
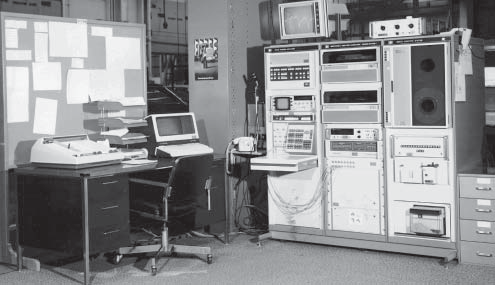
ЕБЪЙгУЖрЕуЪфШызїЮЊПижЦЭЈЕРЪБЃЌгУЛЇПЩвдбЁдёВЛЭЌЕФПижЦВпТдВЮЪ§ЃЌШчЦНОљЁЂзюДѓЛђзюаЁЁЃШчЦНОљПижЦВпТдвдШЋВПВтСПЭЈЕРЕФКЭЮЊПижЦЭЈЕРЃЌВЂЧвЦНОљНсЙћдкЦЕгђПЩвдвдВЛЭЌЕФШЈжиБШНјааЁЃ ЕквЛДњПижЦЦї-ЖРСЂЪНУРЙњзюдчЕФЪ§зжеёЖЏПижЦЦїЪЧдк20ЪРМЭ70ФъДњгЩвЛаЉHPЕФЙЄГЬЪІбаЗЂЕФЁЃЫћУЧдкдчЦкзюГЩЙІЕФаХКХЗжЮівЧHP5451ЩЯВтЪдСЫЖржжПижЦЫуЗЈЁЃHP5451ЪЧЛљгкаЁаЭЛњHP2100ЕФвЛЬЈЩшБИЃЌЦфФкДцКЭМЦЫуФмСІЖМКмгаЯоЃЌЙЄГЬЪІУЧЪЙгУСЫЖржжЧЩУыЕФАьЗЈШЁЕУСЫДяЕНМИЧЇКезШЕФЪЕЪБДјПэЁЃRon PotterКЭ Peter MoseleyСНЮЛЮЊетвЛдчЦкЕФПижЦЦїзїГіСЫжиДѓЕФЙБЯзЁЃ HP5451ЖЏЬЌЗжЮіЯЕЭГ
дкHPЙЋЫОвдHP5451ГЩЙІЕиВтЪдСЫетвЛЫуЗЈКѓЃЌHP5427зїЮЊвЛПюЩЬвЕЛЏЕФВњЦЗдкЩЯЪРМЭ80ФъДњГіЯжЁЃЫќгЩвЛаЉПЩЖбЕўЕФЛњЯфзщГЩЃЌгазЈвЕЕФЯдЪОЦїКЭПижЦУцАхЁЃHP5427ЪЧвЛПюЗЧГЃГЩЙІЕФВњЦЗЃЌШДгЩгкЛнЦеЙЋЫОеНТдЕФЕїећЖјзюжеБЛЗХЦњЁЃ дкЩЯЪРМЭ70ФъДњдчЦкЃЌСэСНЮЛЗЂУїепЃЌEdwin Sloane КЭ Charles HeizmanдквЛМвУћЮЊTime DataЕФЙЋЫОЙЄзїЃЌШЁГіЕУСЫвЛЯюЫцЛњеёЖЏПижЦЕФзЈРћШЈЁЃTime DataКѓРДБЛGenRadЙЋЫОЪеЙККѓЃЌЗЂВМСЫЫћУЧЕФЖРСЂЪНПижЦЯЕЭГЁЃGR25xxМИКѕЪЧЩЯЪРМЭ70ФъДњКѓЦкзюГЩЙІЕФПижЦЦїЁЃЯТУцЪЧGenRad еёЖЏПижЦЦїЯЕЭГЕФееЦЌЃК GenRad 2506
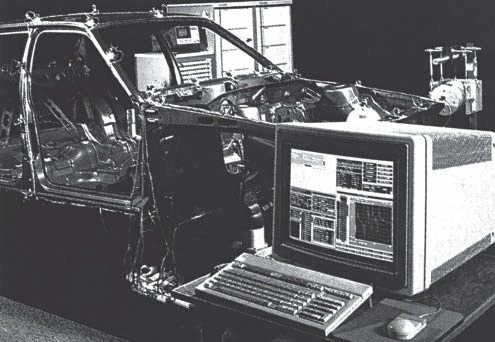
КѓРДGenRadЕФеёЖЏПижЦВПУХГЩЮЊСЫSpectral DynamicsЙЋЫОЕФвЛВПЗнЃЌMarcos UnderwoodВЉЪПЪЧGenRadПижЦЦїЕФзмЙЄЁЃдкЫуЗЈбаЗЂЩЯЃЌЫћзЈзЂгкгУЁАЮѓВюЁБПижЦШЁДњHPВЩгУЕФБШР§ПижЦЁЃTony KellerвВЭЌбљдчЦкЮЊПижЦЦїЕФбаЗЂзіГіСЫОоДѓЕФЙБЯзЁЃDECЙЋЫОЕФPDPЯЕСааЁаЭЛњЪЧеёЖЏПижЦЦїЕФгВМўЦНЬЈЁЃ дкЩЯЪРМЭ80ФъДњдчЦкЃЌLMSгыHPКЯзїЃЌЮЊHPЕФаТгВМўЯЕЭГЃЈParagonЃЉЬсЙЉСЫШЋВПЕФеёЖЏПижЦШэМўЃЌLMSгыHPЕФЙиЯЕОЭгаШчЮЂШэЙЋЫОгыIBMЕФPCЕФЙиЯЕЁЃзюжеЯрБШжЛЬсЙЉгВМўЕФIBMКЭHPЃЌLMSКЭЮЂШэжЄУїСЫШэМўЯњЪлИќЮЊживЊЁЃ дчЦкЕФСэвЛаЉГЇЩЬШчLing ElectronicsЁЂMB DynamicsЁЂSchlumbergerЕШЁЃгЩгкЖМВЩгУзЈгУЕФгВМўЩшБИЃЌдчЦкЕФVCSЯЕЭГЪлМлдк8~20ЭђУРдЊМфЃЌВЂЧвВйзїЪБашвЊЗЧГЃзаЯИЃЌШЛЖјЕУвцгкЩЯЪРМЭ80ФъДњКНЬьЁЂЦћГЕКЭОќЪТЙЄвЕЖдНсЙЙВтЪдЕФОоДѓашЧѓЃЌеёЖЏПижЦаавЕЕЎЩњСЫЁЃКмЖрНёЬьЪЙгУЕФПижЦЫуЗЈЖМЪЧдкЕБЪБВњЩњЕФЁЃЙцЖЈДѓЖрЪ§ИДдгЕФЛЗОГВтЪдБъзМЃЈАќКЌСЫеёЖЏВтЪдЃЉЕФОќБъ810БъзМЃЌвВЪЧдкФЧвЛЪБЦкНЈСЂЦ№РДЕФЁЃ ЕкЖўДњеёЖЏПижЦЦїЁЊЛљгкPCЕФПижЦЦїдкЩЯЪРМЭ90ФъДњЃЌIBM PCЛњдкЙЄвЕЩЯЕУвдгІгУЁЃаэЖрЙЋЫОПЊЪМВЩгУPCЛњНјааЪ§ОнВЩМЏКЭЖЏЬЌаХКХЗжЮіЁЃSri Welaratna КЭ Dave SnyderСНЮЛдЛнЦеЙЋЫОЕФзЈМвДДНЈСЫData PhysicsЙЋЫОЁЃLansmontЙЋЫОвЛЯюФПгыData PhysicsЕФКЯзїПЊЗЂМЦЛЎЃЌПЊЗЂЛљгкPCЛњЕФЪ§зжЪНеёЖЏПижЦЯЕЭГЃЌзюжедьОЭСЫLansmontЙЋЫОЕФTTVIКЭDPЙЋЫОЕФDP540ПижЦЦїЁЃетаЉдчЦкЕФЛљгкDOSВйзїЯЕЭГЕФПижЦЦїОпгадкФЧИіЪБДњФбЕУЕФЭМаЮгУЛЇНчУцЁЃDP540ВЩгУСЫЖрПщISAзмЯпЕФВхШыЪНDSPПЈЃЌУППщПЈгаЖрИіDSPДІРэЦїМАA/DЃЌD/AзЊЛЛаОЦЌЁЃетвЛВњЦЗШЁЕУСЫОоДѓЕФГЩЙІЁЃ Data Physics DP540
АДеегыDP540КЭDP550ЃЈWindowsАцЕФDP540ЃЉЭЌбљЕФЫМТЗЃЌЦфЫќвЛаЉГЇМввВЗЂВМСЫЫћУЧЕФЛљгкPCЕФеёЖЏПижЦЦїЃЌШчSDЙЋЫОЕФPumaЃЌUniDynЙЋЫОЕФDVCЃЌUnholtz-DickieЙЋЫОЕФVWinЕШЁЃ ЕкЖўДњеёЖЏПижЦЦїЕФВњЩњЕУвцгкPCЛњКЭзЈгУDSPДІРэЦїЕФЗЂеЙЃЌДѓДѓЬсИпСЫЦфадФмКЭвзгУадЃЌЭЌЪБГЩБОШДЯТНЕСЫЁЃPCЛњЕФв§ШыЃЌЪЙЕУЯдЪОЁЂБЈИцЙІФмЁЂСЌНгадКЭЯЕЭГадФмМЋДѓЕиЬсИпСЫЁЃМлИёЕФГжајЯТНЕЪЙеёЖЏПижЦЦїЯЕЭГФмгУгкИќЖрЕФЩЬвЕгІгУжаЃЌШчЕчзгВњЦЗКЭАќзАВтЪдСьгђЁЃдкЯЕЭГМлИёЯТНЕЕФЭЌЪБЃЌеёЖЏПижЦЦїВњЦЗЕФЪаГЁЙцФЃШДФъИДвЛФъЕидкдіГЄЁЃ ЕкЖўДњеёЖЏПижЦЦїЯЕЭГЕФШБЕужївЊдкгкЃЌЯЕЭГЙ§гквРРЕPCЛњЕФадФмЁЃетжївЊЪЧгЩгкЦфПижЦЛиТЗвЊЭЈЙ§PC CPUЕФАВзАдкPCжаЕФВхПЈЁЃКмЖрПижЦЦїЪЙгУISAзмЯпЃЌЦфПижЦЛиТЗЪБМфЪмЯогкPC ISAзмЯпЕФжаЖЯКЭДЋЪфДјПэЁЃГ§СЫPCНсЙЙЃЌLMSКЭM+PШдШЛвРРЕгкHPЕФгВМўРДЙЙНЈЦфШэМўЯЕЭГЃЌВЂВЩгУUNIXВйзїЯЕЭГЃЌЦфВњЦЗАќРЈParagon КЭ VXI ЯЕЭГЁЃЫћУЧжївЊУцЯђФЧаЉдкВтЪдЙ§ГЬжаашвЊДѓСПЭЌВНЪ§ОнВЩМЏЕФИпЖЫгУЛЇЁЃ ЕкШ§ДњеёЖЏПижЦЦїЃЌPC зїЮЊЭтЮЇПижЦЖЫЕФПижЦЦїдкЩЯЪРМЭ90ФъДњ Dactron ЙЋЫОвдПЊЗЂаТвЛДњЕФеёЖЏПижЦЦїЃЌZhugeВЉЪПШЯЮЊдгаЕФЯЕЭГДцдкММЪѕЩЯЕФШБЯнЃЌВЂЧвЗЂЯжСЫИФНјЕФЧаШыЕуЁЃЫфШЛетвЛДњВњЦЗШдШЛЪЙгУPCЛњЃЌЕЋPCзїгУвбОЪЧЭтЮЇЩшБИСЫЃЌвђЮЊдкетжжаТЕФПижЦЦїжаЃЌПижЦЛиТЗвбОВЛдйОЙ§PCЛњСЫЁЃВЩгУетвЛВпТдКѓЪЕЯжСЫИќМгПьЫйЕФЛиТЗПижЦЪБМфЁЃЭЌЪБгЩгкВЩгУСЫИЁЕуDSPДІРэЦїЃЌдкетвЛПижЦЦїжаЛЙЪЕЯжСЫЖржжаТЕФЫуЗЈЁЃ LASERЪЧвЛИіВЩгУСЫЖрИіИЁЕуDSPДІРэЦїЁЂ24ЮЛЁЦ-ЈSаЭA/DзЊЛЛаОЦЌЃЌвдМАPCIЁЂUSBзмЯпЕШММЪѕЕФеёЖЏПижЦЦїВњЦЗЁЃгІгУШэМўЯЕЭГВЩгУЮЂШэMFCПЊЗЂЁЃаТПђМмМАаТММЪѕЪЙЕУЯЕЭГОпгааэЖрЙІФмЕФЭЌЪБШдШЛБЃГжСЫвзгУадЁЃDactronЙЋЫОЕФLASERЯЕСаВњЦЗШЁЕУСЫОоДѓЕФГЩЙІЃЌЪ§ЧЇЬЈDactronЙЋЫОЕФLASERЯЕЭГвбОАВзАдкЪРНчИїЕиЁЃ2001ФъLDSЙЋЫОЪеЙКСЫDactronЃЌLDSЪЧЕБЪБЪРНчЩЯзюДѓЕФЕчДХеёЖЏЬЈЩњВњЩЬЃЌЯждкLDSвбГЩЮЊЕЄТѓ B&K ЙЋЫОЕФвЛВПЗнЁЃ LDS-Dactron LASER
дкDactronЙЋЫОЗЂВМСЫLASERКЭCometКѓЃЌаэЖрЦфЫќЙЋЫОАќРЈVRCКЭDPвВЗЂВМПижЦЛиТЗЖРСЂгкPCЕФЕкШ§ДњеёЖЏПижЦЦїЯЕЭГЁЃ ЕкЫФДњеёЖЏПижЦЦїЁЊЭъШЋЭјТчЛЏЕФПижЦЦї2010ФъЃЌУРЙњОЇзъвЧЦїЙЋЫО (Crystal Instruments) ЗЂВМСЫSpider-81ЃЌзюаТвЛДњЕФеёЖЏПижЦЯЕЭГЁЃSpider-81ГфЗжВЩгУСЫзюаТЕФгВМўЩшМЦЃЌаХКХДІРэЫуЗЈКЭаТЕФШэМўММЪѕЁЃ Spider-81 Ъ§зжЪНеёЖЏПижЦЦї
Spider-81ЪЧЕквЛИіЛљгкЭјТчВЂжЇГжIEEE 1588ЪБМфЭЌВНММЪѕЕФеёЖЏПижЦЯЕЭГЁЃЦфЛљБОФЃПщПЩЩшжУЮЊ4Лђ8ЭЈЕРЃЌЧвИНМгЭЈЕРЪ§ПЩРЉеЙСЫ1024ИіЁЃЫќЬсЙЉСЫЗЧГЃИпЕФСщЛюадЁЂВтЪдОЋЖШКЭвзгУадЁЃSpider-81ХфжУСЫвЛИіЭЈЕРЁЂУїССЕФLCDЯдЪОЃЌЪ§зжI/OНгПкЃЌФкжУБИгУЕчГиКЭЧАУцАхПижЦМќЁЃSpider-81ЪЙгУвдЬЋЭјНгПкЁЃ зїЮЊЕк4ДњПижЦЦїSpider-81ОпгавдЯТвЛаЉЬиЕуЃК вдЪ§зжаХКХДІРэЦїЮЊжїПиЕФНсЙЙ гыДЋЭГПижЦЦїЙ§живРРЕгкЭтВПМЦЫуЛњНјааЪЕЪБВйзїВЛЭЌЃЌSpiderЪЧЕквЛИіНЋЪБМфЭЌВНвдЬЋЭјСЌНггыЧЖШыЪНDSPжБНгжБНгМЏГЩдквЛЦ№ЕФПижЦЦїЁЃетвЛВпТдМЋДѓЕидіЧПСЫПижЦадФмЁЂЯЕЭГПЩППадКЭвьГЃБЃЛЄФмСІЃЌЪЙЕУЯЕЭГПЩвдХфжУМЋДѓЕФЭЈЕРЪ§ШДВЛгАЯьЯЕЭГадФмЁЃ зюаТЕФгВМўЩшМЦ Spider-81ФЃПщзАБИгаЕчбЙжїЁЂЕчКЩКЭIEPEЪфШыЭЈЕРЃЌПЩЪЪгУгкГхЛїЁЂеёЖЏКЭЩљбЇВтЪдМАЦфЫќЭЈгУЕФЕчбЙаХКХВтСПЁЃЦфФкВПЩСДцПЩвдЭЌЪБДЂДцЪ§АйИіЭЈЕРЕФВтЪдХфжУЪ§ОнКЭЪЕЪБЗжЮіЪ§ОнЁЃЖрИіЪфГіЭЈЕРЬсЙЉСЫИїжжгыЪфШыВЩбљЦЕТЪЭЌВНЕФаХКХВЈаЮЁЃХфБИСЫвЛИіФмЙЛЯдЪОВтЪдзДЬЌаХЯЂЕФвКОЇЯдЪОЦСЁЃУПЬЈЩшБИЬсЙЉ10ИіМрВтСЌНгРДЖСШЁФЃФтЪфШыКЭЪфГіаХКХЃЌЧАУцАхЩЯЛЙгаЖрИіВйзїАДМќЁЃЭЈЙ§ФкжУЕФЖРСЂЪ§зжI/OКЭRS485ДЎааЖЫПкПЩвдСЌНгЕНЦфЫћгВМўЁЃгавЛИіНєМБжажЙАДХЅПЩвддкЮЃМБЧщПіЯТжаЖЯВтЪдЁЃ МђНрЗНБуЕФЭјТчСЌНг вдЬЋЭјСЌНгЗНЪНЪЙЕУSpider-81дкЮяРэОрРыЩЯПЩвдгыPCЛњРыПЊНЯдЖЃЌетжжЗжВМЪНЕФНсЙЙЗНЪНДѓДѓМѕЩйСЫдыЩљКЭЯЕЭГжаЕФЕчзгИЩШХЁЃЭЈЙ§ЭјТчвЛЬЈPCЛњПЩвдМрЪгКЭПижЦЖрЬЈПижЦЦїЁЃгЩгкПижЦЙ§ГЬКЭЪ§ОнМЧТМЖМдкПижЦЦїФкВПжДааЃЌЭјТчСЌНгЗНЪНВЂВЛЛсгАЯьПижЦадФмЁЃЭЈЙ§ЮоЯпЭјТчТЗгЩЦїЃЌPCЛЙПЩвдЗНБуЕиВЩгУWiFiЗНЪНСЌНгдЖГЬЕФSpiderЩшБИЁЃ ЖрФЃПщМфЕФЪБМфЭЌВНММЪѕ Spider-81ВЩгУСЫIEEE1588ЪБМфЭЌВНММЪѕЃЌдкЭЌвЛИіОжгђЭјЩЯЕФSpiderФЃПщПЩвдДяЕН100nsЕФЪБМфЭЌВНОЋЖШЃЌМДПЩвдБЃжЄ20KHzЗжЮіЦЕПэЯТЃЌЭЈЕРМфЯрЮЛЮѓВюВЛДѓгкЁР1ЖШЁЃВЩгУетвЛММЪѕКЭИпЫйвдЬЋЭјЪЙЕУЗжВМгкЭјТчЩЯЕФФЃПщЃЌПЩвдЯѓвЛЬЈМЏжаЪНЩшБИвЛбљНјааВйзїЁЃ КкЯЛзгФЃЪН:ЭбРыPCЙЄзї Spider-81ПЩвдЭбРыPCЛњЃЌвдКкЯЛзгФЃЪННјааЙЄзїЁЃдкетжжФЃЪНЯТPCЛњдкЯЕЭГПЊЪМВтЪдЧАЃЌЖдЩшБИНјааХфжУЃЌВЂНЋХфжУВЮЪ§ЯТдиЕНЩшБИЩЯЃЌSpiderЖРСЂЭъГЩВтЪдКѓЃЌдйгыPCСЊЛњЃЌPCПЩЯТдиВтЪдНсЙћЪ§ОнЁЃдкВтЪддЫааЦкМфЃЌПижЦЦїАДдЄЖЈЕФСїГЬЙЄзїЃЌВЂЧвгУЛЇПЩвдЭЈЙ§ЧАУцАхАДМќЁЂдЖГЬЪжБњвдМАжЇГжWiFiЕФPDAЃЌШчiPadЕШЩшБИНјааПижЦЁЃ ДјLCDЯдЪО УПЬЈSpider-81ЧАУцАхЖМХфжУвЛПщУїССЕФLCDЯдЪОЦСЃЌвдЪЕЪБЯдЪОЯЕЭГзДЬЌКЭВтЪдаХЯЂЃЌШчПижЦСПRMSжЕЁЂЕБЧАЩЈЦЕЦЕТЪЕШЁЃ ИпПЩППадЩшМЦ Spider-81ЪЧЕквЛЬЈЩшМЦгаджФбБЃЛЄЙІФмЕФеёЖЏПижЦЯЕЭГЃЌЩѕжСдкЭјТчЖЯЭјЛђЕчдДжаЖЯЕФЧщПіЯТвВОпгаБЃЛЄЙІФмЁЃЯШНјЕФАВШЋПижЦЛиТЗдкМИКСУыФкОЭПЩвдМьВтЕНДЋИаЦїЕєЯпЁЃSpider-81гВМўОЙ§СЫбЯИёЕФЛЗОГВтЪдЃЌАќРЈEMIЁЂЮТЖШЁЂЕјТфГхЛїЁЂе§ЯвгыЫцЛњеёЖЏЕШЁЃЯЕЭГЩшМЦПЩвдОЪмГЄЦкЖёСгЕФЙЄзїЛЗОГЖјПЩППЕидЫааЁЃВЩгУИЁЕиЩшМЦвВМѕЩйСЫАВзАЪБЕФТЗНгЕиЮЪЬтЁЃ ИпОЋЖШЕФЪфШыЩшМЦ ЭЈЙ§ЖРЬиЕФММЪѕЃЌSpider-81ЪЧЕквЛЬЈФмЙЛДяЕН150dBЪфШыЖЏЬЌЗЖЮЇЕФеёЖЏПижЦЦїЁЃУПИіЪфШыЭЈЕРдквЛИіСПГЬЯТОЭПЩвдВтЪдзюаЁ6ІЬV зюДѓ 20 VЕФЕчбЙаХКХЃЌетОЭЭъШЋЪЙЕУВЛдйашвЊЯѓДЋЭГПижЦЦїФЧбљЃЌдкВтЪдЪБЖдЪфШыЭЈЕРЩшжУВЛЭЌЕФЪфШыСПГЬЁЃ гХвьЕФПижЦадФм ЭЈЙ§ИФНјЕФПижЦЫуЗЈКЭИпаЇЕФDSPНсЙЙЃЌДѓДѓМѕЩйе§ЯвКЭЫцЛњПижЦЕФЗДРЁЛиТЗЪБМфЁЃИќПьЕФЗДРЁЛиТЗЪБМфФмЙЛЬсИпЫбЫїКЭзЄСєФмСІЃЌвдМАЖдИпQжЕНсЙЙЕФПижЦадФмЁЃетвВЬсЙЉСЫИќПьЕФЗДгІЃЌИќКУЕФАВШЋБЃеЯЁЃ взгкЪЙгУ Spider-81НјвЛВНИФЩЦСЫгУЛЇЕФНчУцЕШМЖЁЃИќЖрЕФЭМаЮжИЕМЁЂЯђЕМКЭЙЄОпЕФМгШыЃЌЪЙЩшжУЗНБуПьНнЁЃШЋаТХХСаЕФНгПкЪЙЦфИќКЯРэЃЌИќКУгУЁЃЁАвьГЃжДааЙцдђЁБЁЂЁАжежЙСщУєЖШЁБКЭЦфЫћаТНгПкЕФЙІФмЃЌЪЙЕУВйзїИќМђЕЅЁЃЪ§ОнПтЙмРэЙІФмЃЌИќШнвздкДѓСПЕФВтЪдЯюФПжаЭЈЙ§ЙиМќзжРДНјааЫбЫїЁЃ КЭФЃЬЌЗжЮіЃЌаХКХДІРэНсКЯSpider-81МЏГЩСЫФЃЬЌЗжЮівдМАЭЈгУЕФаХКХЗжЮіЙІФмЃЌАќРЈЪБМфСїМЧТМЃЌЫВЬЌВЖзНЃЌFFTЃЌздЙІТЪЦзКЭДЋЕнКЏЪ§ЗжЮіЁЃЖрИіSpider-80 DSAФЃПщФмЙЛКЭвЛИіSpider-81ЕФеёЖЏПижЦЦїФЃПщзщГЩвЛИіМЏГЩЯЕЭГНјааЙЄзїЁЃSpider-81ОпгаГЄЪБМфаХКХМЧТМЙІФмЃЌЖдгкЙиМќЕФВтЪдШЮЮёУПИіЭЈЕРЖМПЩвдВЩМЏЪБгђЪ§ОнВЂБЃДцдкФкжУЕФЩСДцжаЁЃ ЫФДњеёЖЏПижЦЦїЕФНсЙЙБШНЯЫФДњеёЖЏПижЦЦїЕФНсЙЙВЛЭЌ ЫФДњеёЖЏПижЦЯЕЭГЕФНсЙЙБШНЯ PCАчбнЕФНЧЩЋ
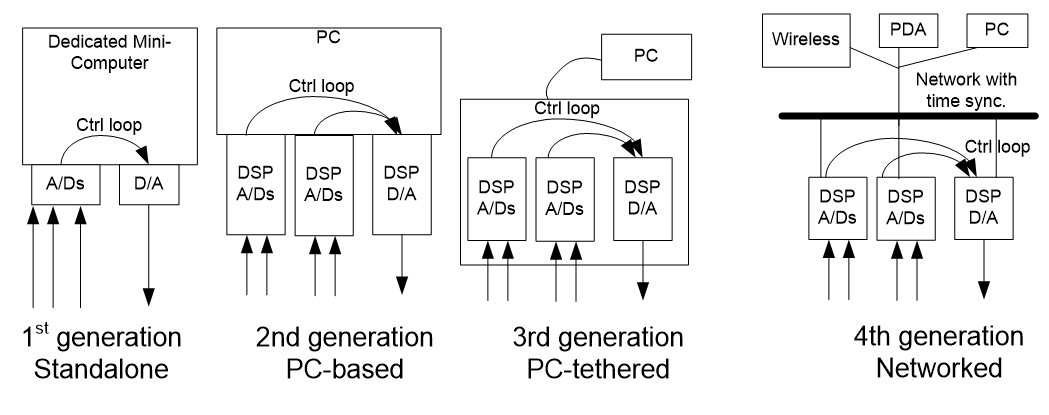
ЕквЛДњПижЦЦїВЛЪЙгУPCЛњЃЌЖјВЩгУзЈгУЕФаЁаЭЛњЃЌПижЦЛиТЗдкаЁаЭЛњжаЁЃЕНЕкЖўДњЃЌPCЪЧПижЦЛиТЗЕФвЛВПЗнЃЌЪ§ОнЭЈЙ§PCЕФзмЯпДЋЕнЃЌетбљЕФжївЊЮЪЬтЪЧШЮКЮPCадФмЩЯЕФгАЯьЖМЛсИЩШХПижЦЛиТЗЁЃдкЕкШ§ДњЃЌPCЕФзїгУжївЊЪЧвЛИіВйзїжеЖЫСЫЁЃ дкЕкЫФДњПижЦЦїЃЌИпЫйЪ§ОнЭЈбЖКЭОЋШЗЪБМфЭЌВНЖМвРРЕгкLANЁЃPCГЩЮЊСЫLANЩЯЕФВйзїжеЖЫжЎвЛЁЃгУЛЇПЩвдбЁдёвдВЛЭЌЕФЗНЪНЃЌШчЮоЯпЁЂдЖГЬЪжБњЁЂPDAЛђЦфЫќЕШЃЌРДВйзїПижЦЦїЁЃЫфШЛвВгавЛаЉЧАЦкЕФПижЦЦїДјгаЭјТчНгПкЃЌЕЋЦфВЛЪЧеыЖдИпЫйЭјТчРДгХЛЏЩшМЦЕФЃЌЖјЧввВВЛжЇГжбЧЮЂУыЕФЪБМфЭЌВНОЋЖШЁЃ ШЋЭјТчаЭПижЦЦїБШЧАМИДњВњЦЗЬсЙЉСЫИќЖрЕФгХЕуЃЌгУЛЇПЩвдНЋПижЦЦїЗХжУдкРыеёЖЏЬЈНЯНќЕФЮЛжУЃЌЖјВйзїПЩвддкдЖРыЪ§АйУздЖЕФПижЦЪвФкНјааЁЃPCПЩвдзїЮЊЩшжУКЭВйзїЕФжеЖЫЃЌЕЋдкЪЕбщЙ§ГЬжавВПЩвджЇГждЖГЬПижЦЪжБњЛђPDAЩшБИНјааВйзїЁЃ ЪЕЪБМЦЫуадФм
ЕквЛДњеёЖЏПижЦЦїЯЕЭГВЂВЛЪЧеце§ЕФЪЕЪБЯЕЭГЁЃЪЕЪБадЪЧжИУПвЛИіЪфШыЕФВЩбљаХКХЕуЖМВЮгыДДНЈЯТвЛжЁЧ§ЖЏЪфГіаХКХЁЃаЁаЭЛњЕФCPUдкМЦЫуЯЕЭГЕФДЋЕнКЏЪ§ЪБЃЌЦфЪЕКіТдСЫаэЖржЁЕФЪфШыЪ§ОнЃЌЦфПижЦЛиТЗЪБМфвдУыМЦЁЃ
ЕкЖўДњеёЖЏПижЦЦїЪЧЪЕЪБЯЕЭГЁЃЫљгаЕФВЩбљЕуЖМгУгкМЦЫуЧ§ЖЏаХКХСЫЁЃЛиТЗЪБМфвВаЁгк1УыЃЌРћвцгкPCЛњЕФЪЙгУЃЌгУЛЇНчУцДѓДѓИФЩЦЃЌВЂНЕЕЭСЫЯЕЭГдьМлЁЃ ЕкШ§ДњеёЖЏПижЦЦїПЩГЦЮЊЁАГЌЪЕЪБЁБЯЕЭГЁЃЫќгЕгагУВЩбљЪ§ОнЭЌЪБНјааЖрШЮЮёЕФФмСІЁЃШчдкDactronЕФЫцЛњПижЦЦїжаЃЌдкВЛЭЌЕФЦЕТЪЖЮФкЃЌПЩЭЌЪБдЫааЖрИіПижЦЛиТЗЁЃМЋЖЫЕФЧщПіШчЃКе§Яв+ЫцЛњПижЦЦїжаЃЌЖўИіЫцЛњПижЦФкКЫЁЂ12Иіе§ЯвПижЦФкКЫПЩЭЌЪБдЫааЃЌЦфПижЦЛиТЗЪБМфвВЫѕЖЬЕНmsМЖЁЃ ЕквЛКЭЕкЖўДњЭЈгУПижЦЦїЕФГіЯжЪЧЮЊСЫЪЪгІБЛЪдбщЮяЦЗ(ЪдМў)ЕФЛњаЕЬиадВтЪдЕФвЊЧѓЁЃдквЛаЉгІгУжавЊЧѓПижЦЯЕЭГФмЙЛЬсЙЉ5KHzЕФЪЕЪБПижЦДјПэКЭИпЙ§70dBЕФПижЦЖЏЬЌЗЖЮЇЃЌетЪЧЕквЛЁЂЖўДњПижЦЦїТњзуВЛСЫЕФЃЌЕкШ§ДњПижЦЦїЕФГіЯжИФБфСЫетвЛЧщПіЁЃЕУвцгкИЁЕуDSPДІРэЦїКЭЁЦ-ЈSаЭADзЊЛЛЦїЃЌ ЫуЗЈИФНј
вРППИќЯШНјЕФДІРэЦїЃЌдкетНЯаТЕФПижЦЦїжаЃЌаэЖраТЕФШэМўЫуЗЈвВЕУвдЪЕЯжЁЃОйР§ШчЯТЃК
дкDactronЕФПижЦЦїжаЃЌВЩгУСЫвЛИіЯШНјЕФТЫВЈЦїММЪѕЃЌЪЙЕУЫцЛњПижЦЦїдкЕЭЦЕЖЮПЩФмЛёЕУНЯКмИпЕФЦЕТЪЗжБцТЪЃЌетвЛММЪѕБЛГЦЮЊЖрЗжБцТЪПижЦЁЃ
дкVibration ResearchЕФПижЦЦїжаЃЌЧЭЖШПижЦБЛМЏГЩЕНЫцЛњПижЦжаЃЌЪЙЕУаХКХПЩвдОпгаЗЧИпЫЙЬиадЃЌДгЖјИќМгНгНќДгЪЕМЪЕРТЗЩЯМЧТМЕФаХКХЁЃ
дкSpectral DynamicsЕФПижЦЦїжаЃЌе§ЯвПижЦЦїЪЕЯжСЫвЛИіаЮзДИќКУЕФТЫВЈЦїЃЌЯрБШВЩгУОиаЮДАНјааЦЕЦзЗжЮіЕФВњЦЗЃЌЦфЬсЙЉЕФЭЈДјЬиадЗЧГЃЦНЬЙЁЃ НсТлдкЙ§ШЅЕФ40ФъРяЃЌеёЖЏПижЦЦївбОЗЂеЙСЫЫФДњВњЦЗЃЌЫќУЧЪЧЕквЛДњЖРСЂЪНЁЂЕкЖўДњЛљгкPCЕФПижЦЦїЁЂЕкШ§ДњPCвРРЕЪНКЭЕкЫФДњШЋЭјТчФЃЪНЁЃЦфжаЕкЫФДњВњЦЗШЋЭјТчЪНЛљгквдЬЋЭјКЭIEEE1588ЪБМфЭЌВНММЪѕЃЌЫќЬсЙЉСЫБШЧАБВВњЦЗгХдНЕФСщЛюадЁЂПЩППадЁЂПЩХфжУадКЭбгЩьадЁЃ
| 

 ЗЂБэгк 2018-5-17 10:42
ЗЂБэгк 2018-5-17 10:42



 ЬсЩ§ПЈ
ЬсЩ§ПЈ БфЩЋПЈ
БфЩЋПЈ ЯдЩэПЈ
ЯдЩэПЈ